
About
I'm a Research Scientist at Meta Reality Labs Research working on Spatial AI research. I pursued my PhD at Technical University of Munich (TUM), supervised by Prof. Daniel Cremers. During my PhD, I was also a senior computer vision engineer at Artisense, a startup co-founded by Prof. Cremers. Prior to my PhD, I obtained my Master's degree at TUM and my Bachelor's degree at Beijing University of Posts and Telecommunications.
Updates
News
- LAMP accepted at CVPR 2026.
- Sonata accepted at CVPR 2025 as a Highlight.
- Behind the Scenes accepted at CVPR 2023.
- I've joined Reality Labs Research as a Research Scientist.
- TANDEM accepted at CoRL 2021 and won the Best Demo Award at 3DV 2021.
- Received Outstanding Reviewer for CVPR 2021.
Selected Work
Publications


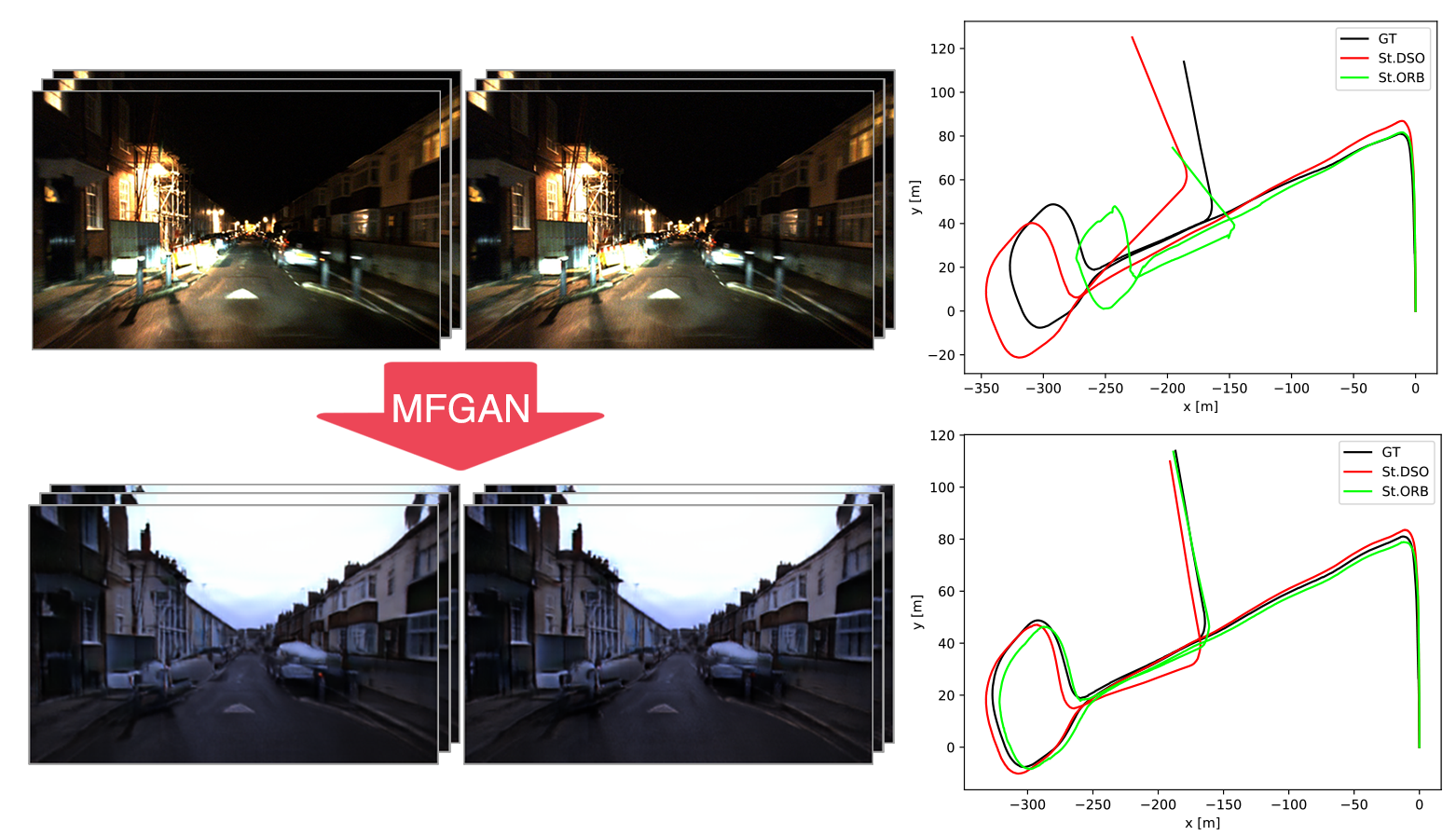
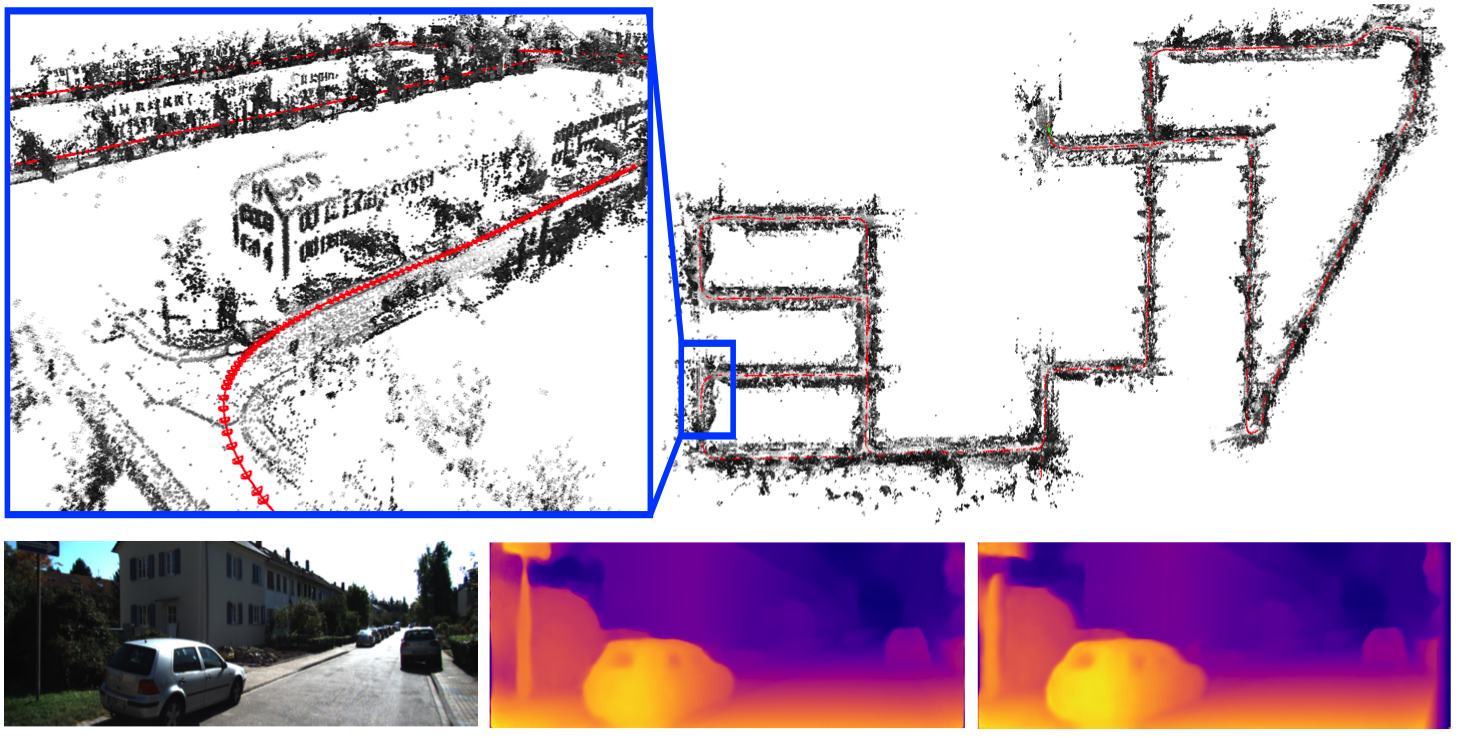
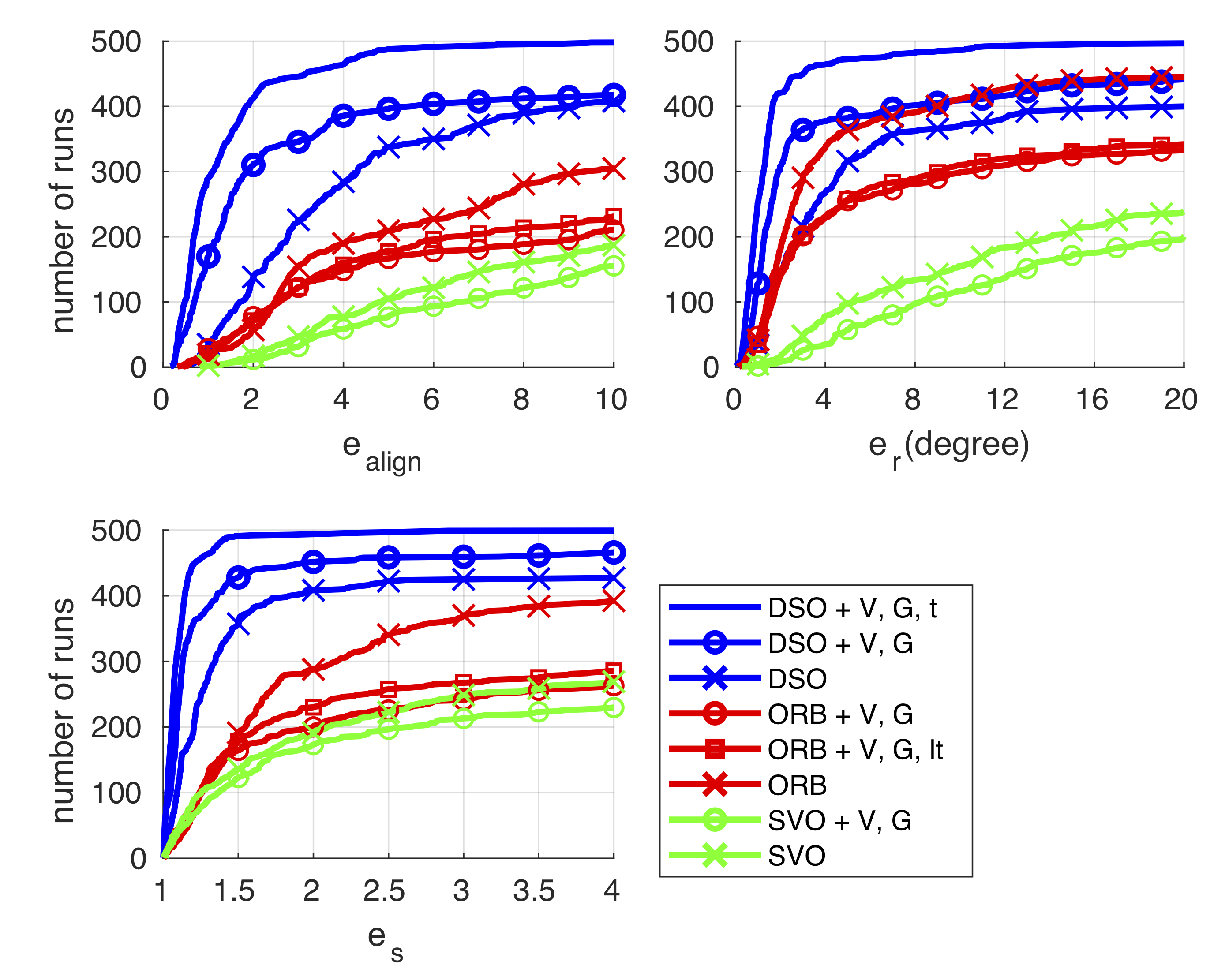
Challenges in Monocular Visual Odometry: Photometric Calibration, Motion Bias and Rolling Shutter Effect
IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robots and Systems (IROS), 2018
Community
Reviewer
- Computer Vision: CVPR, ECCV, ICCV, T-PAMI
- Machine Learning: ICLR, AAAI, NeurIPS, PR
- Robotics: ICRA, IROS, RA-L, AURO, ISPRS, T-RO
- Computer Graphics: SIGGRAPH